Soil Moisture
Lecture 7: Soil Moisture Uncertainty Estimation

Funded by:


Introduction
Parallel to the soil moisture calculation, an estimate of the uncertainty of the soil moisture retrieval is determined by rules of error propagation.
Error Propagation I
Determination of the noise level of the backscatter measurements
Assumptions:
- all three beams observe the same region
- the fore- and aft-beam have the same incidence angle and are thus comparable (as long as there are no azimuthal effects)
Error Propagation II
The difference $\delta$ should be 0:
$\delta\;=\;\sigma^0_{fore}\;-\;\sigma^0_{aft}$Its variance should be twice the variance of one of the beams (assuming independent measurements)
$var[\delta]\;=\;2\;*\;var[\sigma^0]$Estimate of the standard deviation of the backscatter $\sigma^0$ (the so-called ESD):
$ESD\;=\;std[\sigma^0]\;=\;\frac{std[\delta]}{\sqrt{2}}$
Error Propagation III
A noise estimate of the normalised backscatter $\sigma^0(40°,t)$ is obtained by:
$var[\sigma^0(40°,t)]\;=\;\frac{1}{9}\sum_{i=1}^3{\left(\begin{array}{l l}ESD^2\;+\;var[\sigma'(40°,t)]\;*\;(\theta_i\;-\;40°)^2\\ +\;\frac{1}{4}var[\sigma''(40°,t)]\;*\;(\theta_i\;-\;40°)^4\end{array}\right)}$
$i$...the individual fore-, mid- and aft-beam measurements of the backscatter triplet
Uncertainty estimate of the soil moisture retrieval I
no simple general expression for the noise estimate of the dry and wet reference
noise estimate of wet reference is simpler because the wet crossover angle and the reference incidence angle are both equal to 40 degrees
Uncertainty estimate of the soil moisture retrieval II
Final equation for an uncertainty estimate of the soil moisture retrieval:
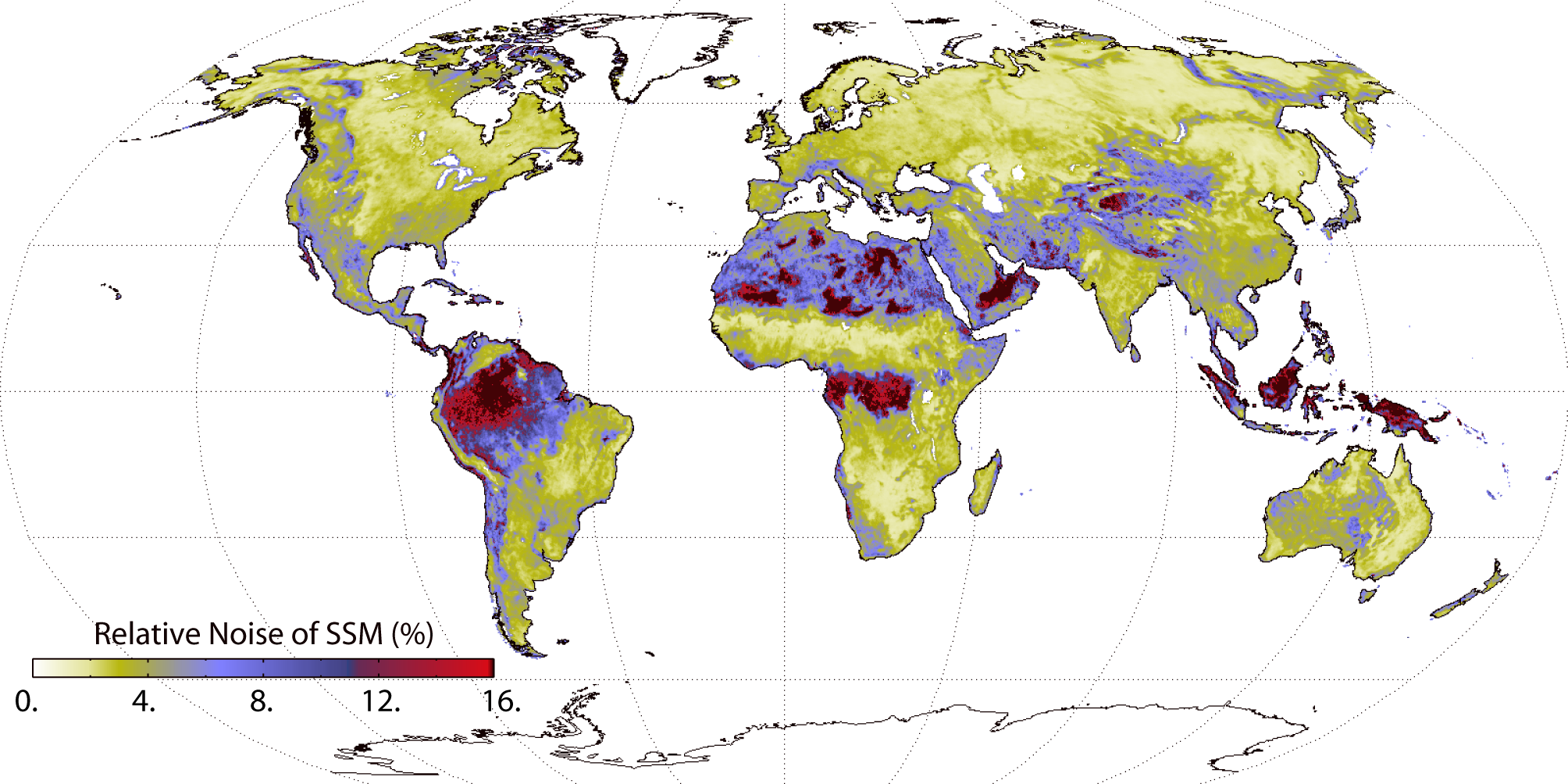
SCAT noise from error propagation